热点资讯
其他资讯
营盘乡工业机械设备行星式PLF80-4自动化伺服减速箱
文章来源:ymcdkj
发布时间:2024-04-29 12:32:25
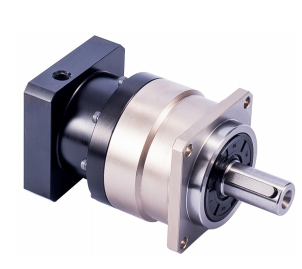
营盘乡工业机械设备:行星式PLF80-4自动化伺服减速箱
量仪的放大倍数较高,人为误差较小,不会影响测量精度;工作时无机械磨擦,所以没有回程误差。 简单,读数容易,能够进行连续测量,很容易看出各尺寸是否合格。实现测量头与被测表面不直接接触,减少测量力对测量结果的影响,同时避免划伤被测件表面,对薄壁零件和软金属零件的测量尤为适用。由于非接触测量,测量头可以减少磨损,延长使用期限。气动量仪主体和测量头之间采用软管连接,可实现远距离测量。结构简单,工作可靠,调整、使用和维修都十分方便。
3、行星齿轮减速机体积小、质量小,结构紧凑,承载能力大 由于行星齿轮传动具有功率分流和各中心轮构成共轴线式的传动以及合理地应用内啮合齿轮副,因此可使其结构非常紧凑。再由于在中心轮的周围均匀地分布着数个行星轮来共同分担载荷,从而使得每个齿轮所承受的负荷较小,并允许这些齿轮采用较小的模数。同轴减速机此外,在结构上充分利用了内啮合承载能力大和内齿圈本身的可容体积,从而有利于缩小其外廓尺寸,使其体积小,质量小,结构非常紧凑,且承载能力大。一般,行星齿轮传动的外廓尺寸和质量约为普通齿轮传动的1/2~1/5 (即在承受相同的载荷条件下)。
4、行星齿轮减速机传动效率高 由于行星齿轮传动结构的对称性,即它具有数个匀称分布的行星轮,使得作用于中心轮和转臂轴承中的反作用力能互相平衡,从而有利于达到提高传动效率的作用。在传动类型选择恰当、结构布置合理的情况下,其效率值可达0.97~0.99。
伺服减速机的重要参数: 减速比:输入转速与输出转速之比。 级数:行星齿轮的套数。一般可以达到三级,效率会有所降低。 满载效率:在负载情况下(故障停止输出扭矩),减速机的传递效率。 工作寿命:减速机在额定负载下,额定输入转速时的累计工作时间。 额定扭矩:是额定寿命允许的长时间运转的扭矩。当输出转速为100转/分,减速机的寿命为平均寿命,超过此值时减速机的平均寿命会减少。当输出扭矩超过两倍时减速机故障。 噪音:单位分贝dB(A),此数值实在输入转速3000转/分,不带负载,距离减速机1米距离时测量值。 回差:将输入端固定,是输出端顺时针和逆时针方向旋转,当输出端承受正负2%额定扭矩时,减速机输出端由一个微小的角位移,此角位移即为回程间隙,也称“背隙”。单位是“分”,即一度的1/60。
一、减速比概念:即减速装置的传动比,是传动比的一种,是指减速机构中瞬时输入速度与输出速 度的比值,用符号“i”表示。如输入转速为1500r/min,输出转速为25r/min,那么其减速比则为:i=60:1。一般的减速机构减速比标注都是实际减速比,但有些特殊减速机如摆线减速机或者谐波减速机等有时候用舍入法取整,且不要分母,如实际减速比可能为28.13,而标注时一般标注28。 二、减速比的计算方法 1、定义计算方法:减速比=输入转速÷输出转速。 2、通用计算方法:减速比=使用扭矩÷9550÷电机功率×电机功率输入转数÷使用系数。
3、齿轮系计算方法:减速比=从动齿轮齿数÷主动齿轮齿数(如果是多级齿轮减速,那么将所有相啮合的一对齿轮组的从动轮齿数÷主动轮齿数,然后将得到的结果相乘即可。 4、皮带、链条及摩擦轮减速比计算方法:减速比=从动轮直径÷主动轮直径。 三、电机扭矩的概念:电机扭矩即电动机的输出扭矩,为电动机的基本参数之一。单位为N.M(牛. 米)。 四、电机输出扭矩与电机转速、功率的关系。 1、公式:T=9550P/n 此公式为工程上常用的:扭矩;功率;转速三者关系的计算公式。 式中:T--扭矩;9550--常数(不必追究其来源);P--电机的功率(KW);n--输出的转速(转/分) 注:需要注意的是:若通过减速机计算扭矩时,要考虑齿轮传动效率损失的因素。 2、伺服电机扭矩计算公式:T=F*R*减速比。例子:带动100kg的物体,R=50mm,减速比为:1:50, 求伺服电机的扭矩?: =1.98N.M 五、减速机扭矩计算公式 1、速比 速比=电机输出转数÷减速机输出转数 ("速比"也称"传动比") 2、知道电机功率和速比及使用系数,求减速机扭矩如下公式: 减速机扭矩=9550×电机功率÷电机功率输入转数×速比×使用系数 3、知道扭矩和减速机输出转数及使用系数,求减速机所需配电机功率如下公式:
电机功率=扭矩÷9550×电机功率输入转数÷速比÷使用系数
伺服马达采用的是 为 的技术,伺服马达系统稳定性研究是从画控制系统框图始的,画控制系统框图的曰的分清系统所包含的环节,并得出各个环节的传送函数;然后对伺服马达稳定性详细分析,主要包括对系统框图进行、相应的信号流图、求传递函数、根据稳定判据来判断其稳定性。
伺服马达是一种精度非常高,响应速度非常快的智能电机,但是本钱高,能量消耗大。将伺服马达采用闭环系统,具有伺服马达的功能,缩小了装置空间,本钱相对于伺服电机来说降低了很多,由于在改造的过程中采用了进的技术,电能也比之前传统的电机消耗的要少。
00T3
上一篇:江阴档案室选层柜手摇密集柜搬迁