热点资讯
其他资讯
吉林特卖新设备步进式BH120R-L2-15-B2-D1-S6径向行星减速箱
文章来源:ymcdkj
发布时间:2024-05-07 12:49:59
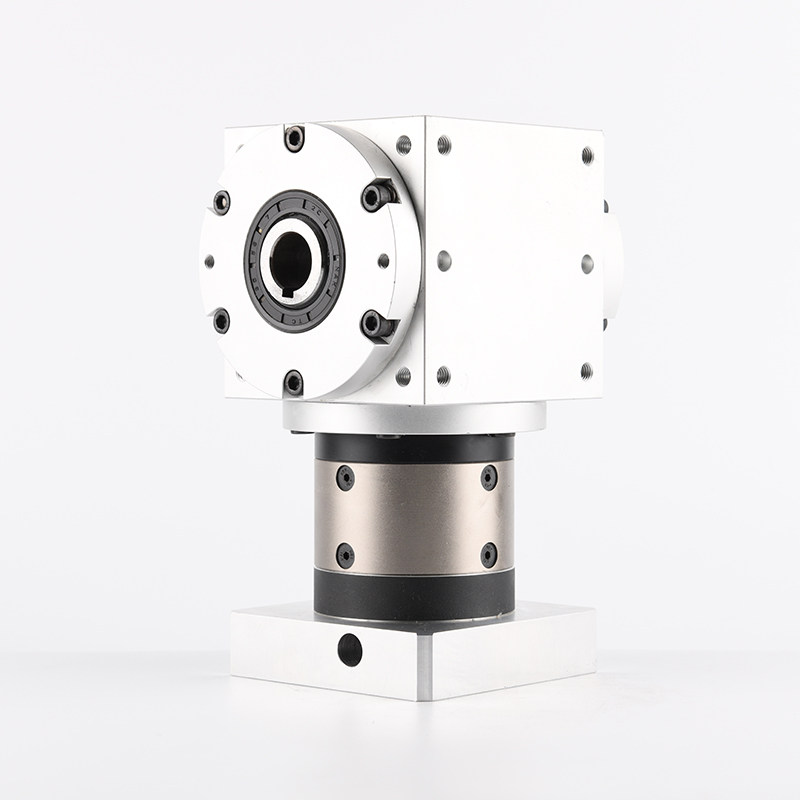
2-D1-S6径向行星减速箱
超声波测厚仪示值的因素工件表面粗糙度过大,造成探头与接触面耦合效果差,反射回波低,甚至无法接收到回波信号。对于表面锈蚀,耦合效果极差的在役设备、管道等可通过砂、磨、挫等方法对表面进行,降低粗糙度,同时也可以将氧化物及油漆层去掉,露出金属光泽,使探头与被检物通过耦合剂能达到很好的耦合效果。工件曲率半径太小,尤其是小径管测厚时,因常用探头表面为平面,与曲面接触为点接触或线接触,声强透射率低(耦合不好)。
行星减速机的工作原理是由一个内齿圈紧密结合于齿轮箱壳体上,环齿中心有一个自外部动力所驱动太阳轮,介于两者之间有一组由三颗齿轮等分组合于托盘上之行星齿轮组该组行星齿轮依靠着出力轴、内齿圈及太阳轮支撑浮游于期间;行星减速机当入力侧动力驱动太阳轮时,可带动行星齿轮自转,并依循着内齿圈之轨迹沿着中心公转,游星之旋转带动连结于行星架出力轴输出动力。根据其工作原理来说行星减速机不具备自锁功能。
蜗轮蜗杆减速机的主要特点是具有反向自锁功能,可以有较大的减速比,输入轴和输出轴不在同一轴线上,也不在同一平面上。但是一般体积较大,传动效率不高,精度不高。
行星式齿轮减速机的传动机构是齿轮,其结构简图不用画,很简单,想象一下有一大一小两个圆,两圆同心,在两圆之间的环形部分有另外三个小圆,所有的圆中的一个是内齿环,其他四个小圆都是齿轮,中间那个叫太阳轮,另外三个小圆叫行星轮.伺服电机带动减速机的太阳轮,太阳轮再驱动支撑在内齿环上的行星轮,行星轮通过其与外齿环的啮合传动,驱动与外齿环相连的输出轴,就达到了减速的目的 。
谐波减速机的谐波传动是利用柔性元件可控的性变形来传递运动和动力的,体积不大、精度很高,但缺点是柔轮寿命有限、不耐冲击,刚性与金属件相比较差。输入转速不能太高。行星减速机其优点是结构比较紧凑,回程间隙小、精度较高,使用寿命很长,额定输出扭矩可以的很大。但价格略贵。摆线减速机额定输出扭矩可以的很大。错误的选型致使所配减速机出力不够。有些用户在选型时,误认为只要所选减速机的额定输出扭矩满足工作要求就可以了,其实不然,一是所配电机额定输出扭矩乘上减速比,得到的数值原则上要小于产品样本的相近减速机的额定输出扭矩,二是同时还要考虑其驱动电机的过载能力及实际中所需工作扭矩。卧式摆线针轮减速机的工作位置均为水平位置。
步进电机的选择 步进电机有步距角(涉及到相数)、静转矩、及电流三大要素组成。一旦三大要素确定,步进电机的型号便确定下来了。 1、步距角的选择 电机的步距角取决于负载精度的要求,将负载的分辨率(当量)换算到电机轴上,每个当量电机应走多少角度(包括减速)。电机的步距角应等于或小于此角度。目前市场上步进电机的步距角一般有0.36度/0.72度(五相电机)、0.9度/1.8度(二、四相电机)、1.5度/3度 (三相电机)等。
2、静力矩的选择 步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。单一的惯性负载和单一的摩擦负载是不存在的。直接起动时(一般由低速)时二种负载均要考虑,加速起动时主要考虑惯性负载,恒速运行进只要考虑摩擦负载。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸) 3、电流的选择 静力矩一样的电机,由于电流参数不同,其运行特性差别很大,可依据矩频特性曲线图,判断电机的电流(参考驱动电源、及驱动电压)
+ -100-S2-P1 0-S2-P1
上一篇:贺兰电子档案选层柜钢制书架搬迁
下一篇:上海lc9铝日日发货