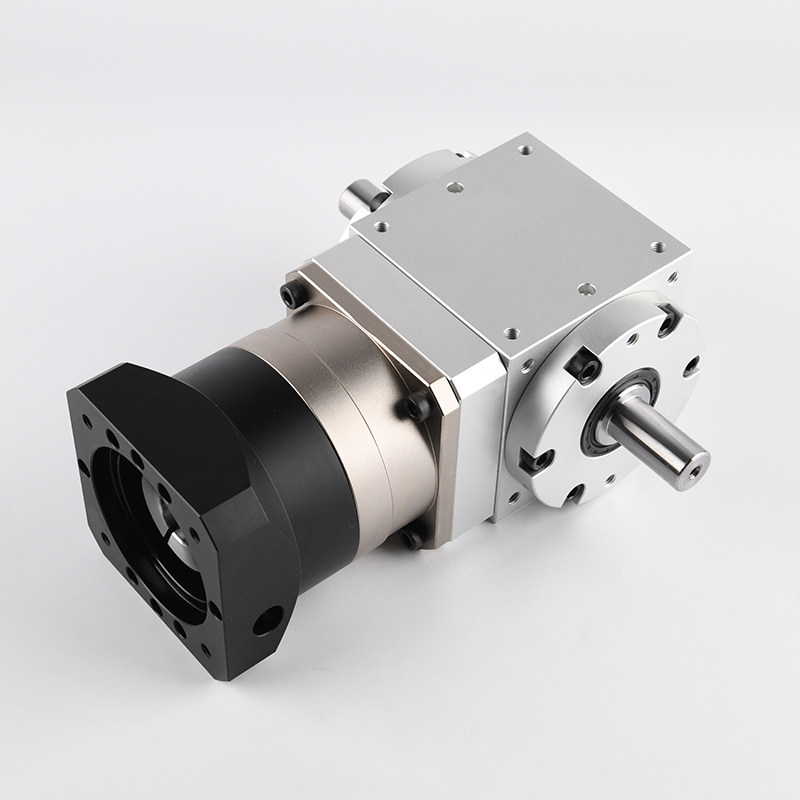
内江批发新传动设备轮轴式ZPLF060-200高力矩伺服减速机
文章来源:ymcdkj
发布时间:2024-04-30 20:28:18
矩伺服减速机
扭力扳手的工作原理是电机经行星齿轮机构减速后,将动力传递给冲击头,冲击头两凸头通过扳轴爪带动扳轴旋转,由扳轴完成动力输出。那么扭力扳手使用一段时间后不可避免会出现输出动力下降的现象,随着扳手的使用时间的增加,输出动力将继续下降,直至无法工作。技术人员通过对电动扭力扳手的解体观察,发现所有使用过的扭力扳手,其扳轴工作面无一例外地发生了严重磨损。磨损后的工作面是与原工作面成大约45度角的一个斜面,这个斜面在工作中将使作用在扳轴上的冲击力分散。
力矩伺服减速机
众所周知,一台机器通常是由三个基本部分组成:即动力机、行星减速机和工作机构。有时根据机器工作需要,可能还有控制系统和润滑、照明等辅助系统。行星减速机是指将动力机产生的机械能以机械的方式传送到工作机构上去的中间装置。
行星减速机在其中起到的作用是,降速同时提高输出扭矩,扭矩输出比例按电机输出乘减速比,但要注意不能超出行星减速机额定扭矩。另外,减速还降低了负载的惯量,惯量的减少为减速比的平方,其实大家都可以看一下,一般电机都会有一个惯量数值的。
内江新传动设备:轮轴式ZPLF060-200高力矩伺服减速机
对于机器人行走用的电机,要求是比较高的,不是一般的电机可以胜任的。对于其的选择,我们应该考虑到以下几点: 考虑电机的转动稳定度,即要能很好的锁定其转动角速度,这样对于控制机器人的行走就可以从动力上得到了步的控制,所以需要考虑电机转动时的线性平稳度的问题。这样我们就得用闭环工作的电机,例如:直流伺服电机,直流无刷伺服电机,交流伺服电机,普通无刷电机,步进电机等。 ? 考虑电机的转速,要考虑机器人的行走速度和低速的对准问题。 ? 考虑机器人提速快慢的问题,即电机的扭矩和轮子直径的问题。 ? 考虑机器人供电的问题。 ? 考虑到电机在机器人上的问题。 ? 考虑对电机控制实现的容易程度的问题。 ? 考虑到对电机及其部件的维护和维修问题。 综合上述,我们应当是伺服电机,当然考虑到供电,我们应当选择24V以下直流供电的直流伺服电机或直流无刷伺服电机。虽然步进电机可以有很好的精度,但是步进电机的扭矩太小,不适合机器人的行走电机。普通无刷电机虽然也可以是闭环的,但是其工作时对角速度的锁定能力是远远不能满足我们的需要的,因为他只有三个霍尔传感器用于检测其转子的位置(转速检测)。所以我们的选择就在直流伺服电机或直流无刷伺服电机。
斜齿轮减速机是辊道中非常重要的装备,在每台辊道的内部都需要使用数台电机,主要是因为辊道的体积较大,因此一台电机无法带动整个辊道的作业和运行,所以需要借助于多台。斜齿轮减速机的结构非常紧密,但是也非常的牢固,同时还是全封闭式的结构,所以在作业过程中,其作业过程都是通过内部完成,不会对人体和机械造成影响,从而使辊道实现了安全的特点。
斜齿轮减速机在作业时,能够实现高转矩负载,从而保证了辊道的作业时间和承受的重量,扩大了辊道的应用范围。电机的全封闭结构还保证了内部不容易受到外界环境的影响,也不容易出现积水的现象,有效的避免了内部金属材料出现腐蚀的现象,从而延长了其使用寿命,同时也保证了辊道的长时间使用。
内江新传动设备:轮轴式ZPLF060-200高力矩伺服减速机
K7-19DE19
EVB-115 -38JA32
-K7-38JA32 -K7-28GD24 E 7-28HF22
K7-28HB24
K7-19GB19
EVB-115 -28KA22
-K7-28KA22
液压是孔器一种能在金属板上孔的 手动液压工具,能够起到一般冲压设备所不达到的孔作用。其使用方法及操作规范如下:孔工件在孔前,先用手电打一个11.5mm的引道孔。将活塞拉杆,旋进活塞缸的螺孔中,然后将垫圈套进活塞拉杆再套进凹模。再将活塞拉杆伸进工件的引道孔, 拧进凸模,使凸模的口和面紧密结合,凸模,工件,凹模三者可靠的固定.按顺里针方向关住回油伐,然后反复按揿加力手柄,使活塞泵始工作,油压上长,凹凸模之间剪切力增加,模具在工件上剪孔,直到剪通为止。