武备镇传动设备行星式BL060A-L1-7-D1-S5联轴行星式减速器
文章来源:ymcdkj
发布时间:2024-05-10 18:27:58
武备镇传动设备:行星式BL060A-L1-7-D1-S5联轴行星式减速器
另外,簧铰链还有各种特殊规格,如:内侧45度角铰链,外侧135度角铰链,启175度角铰链。关于直角(直臂),半弯(半曲),大弯(大曲)的三种铰链的区别:直角的铰链可以让门完全遮挡住侧板半弯的铰链可以让门板遮住部分侧板大弯的铰链可以让门板和侧面板平行1.3.大门铰链它又分普通型和轴承型,普通型上面已经讲过,现重点讲轴承型。轴承型从材质上可分铜质、 1厚度有2.5mm、3mm轴承有二轴承、四轴承。
武备镇传动设备:行星式BL060A-L1-7-D1-S5联轴行星式减速器
在“选型”流程的初始界面,需要输入4个关键信息:
1)应用类型
选择“连续工作”或“循环运行”。任何在某一方向上运行四小时或更长时间而不停止或不改变速度的应用场合均可视为连续工作。所有其他应用场合,包括那些运行时间超过四个小时,但改变运转方向的可视为循环运行。
2)背隙要求
“超精密”级单级和双级减速机的背隙分别为3acr-min和5 arc-min。
“精度”级单级和双级减速机的背隙分别为5 acr-min和8arc-min。
“标准”级单级和双级减速机的背隙分别为8acr-min和10arc-min。
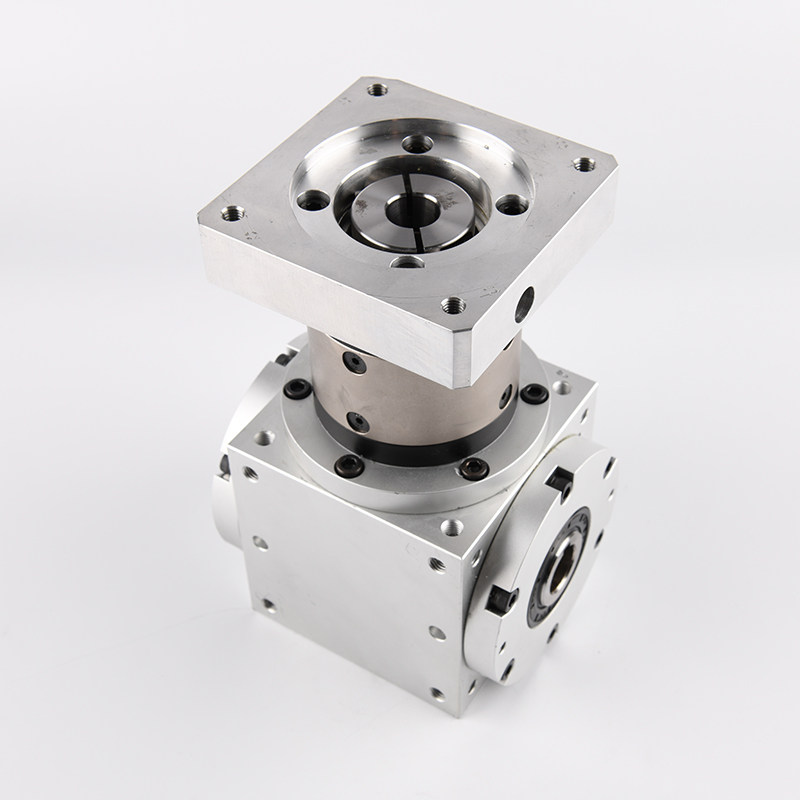
3)减速机类型或方向(直线型或直角型)
直角型减速机有三个独立选项:标准轴、双轴和空心轴。
武备镇传动设备:行星式BL060A-L1-7-D1-S5联轴行星式减速器
(3)电磁制动一般在SVOFF后启动,否则可能造成放大器过载。动态制动器一般在SVOFF或主回路断电后启动,否则可能造成动态制动电阻过热。
选择配件 :
(1)有些系统如传送装置,升降装置等要求伺服电机能尽快停车。而在故障、急停、电源断电时伺服器没有再生制动无法对电机减速。同时系统的机械惯量又较大,这时需选用动态制动器动态制动器的选择要依据负载的轻重,电机的工作速度等。
(2)有些系统要维持机械装置的静止位置需电机较大的输出转矩且停止的时间较长,如果使用伺服的自锁功能往往会造成电机过热或放大器过载。这种情况就要选择带电磁制动的电机。
减速机的2个重要概念
对于伺服专用减速机,不论何种形式,通常都会涉及后面讨论的性能指标。然而,可能是由于商业上需要,通常各个厂家并没有对其样本上的各种参数出明确的定义,这给产品的对比带来一定的困难,所以,在讨论指标之前,我们先明确两个描述齿轮箱工作状况的重要概念
1, 占空比(Duty cycle) (ED)
占空比指的是减速机在一个完整的工作周期内,实际动作的时间占到整个工作周期时间的一个百分比。这是判定工作模式是S1(连续工作)还是间歇工作(S5)的一个参数,计算如下:占空比ED=(加速时间+工作时间+减速时间) / (加速时间+工作时间+减速时间+停顿时间)
2, 工作模式(S1,S5)
工作模式标准概念源自于电机应用,是由电子委员会(International Electrotechnical Commission)设立的。后来引申为所有以电机驱动为主要驱动源的传动部件的工作模式。
S1 – 连续工作模式,在恒定负载下运行一段时间以达到电机的热平衡。“热平衡”指温度升达某个数值后不再上升,通过有效散热与周围环境达到温度平衡的状态。
但是由于不同产品的温限不同,通常是用产品的各种零件中热稳定值 弱的部分,比如电机一般指线圈,而齿轮箱一般指润滑脂,因为温度太高可能破坏油膜的稳定性。图B-18示典型电机升温曲线,
时间长了进入了“热平衡”状态
在齿轮箱应用中,厂家根据其实验数据,往往会给出具体的数值来定义工作模式。
S1工作模式(连续工作模式)是指齿轮箱不间断工作超过15(20)分钟,或者工作占空比大于60%,并且齿轮箱的温度不能超过90(70)℃。()里的数据是有些厂家的不同数值。----工业界的标准够乱吧!
S5 工作模式(间歇工作模式)是指工作占空比小于60%,另外需要考核起停频率,也就是说在一个小时内的起停次数不能超过1000次,否则需要在计算力矩时,要乘以冲击系数Fs。
值得注意的是:在实际选型使用中,我们往往遗漏工作模式,脱离工作模式的额定力矩指标,是不可以作为选型指标使用的,这点在实际选型中往往会被忽略,进而导致减速机使用中出现意外损坏问题。
武 -S5联轴行星式减速器
25-S2-P2-P1< S2-P2-P1
00-S2-P2-P1
取消具半径补偿用G4,取消具半径补偿也可用H。使用中需注意:建立、取消补时,即使用G4G4G4指令的程序段必须使用G或G1指令,不得使用G2或G3,当具半径补偿取负值时,G41和G42的功能互换。具半径补偿有B功能和C功能两种补偿形式。由于B功能具半径补偿只根据本段程序进行补计算,不能解决程序段之间的过渡问题,要求将工件轮廓成圆角过渡,因此工件尖角处工艺性不好,C功能具半径补偿能自动两程序段具中心轨迹的转接,可完全按照工件轮廓来编程,因此现代CNC数控机床几乎都采用C功能具半径补偿。